NLP - Lecture - Sequence Models
Modeling Time in Neural Networks
Language is inherently temporal. Yet the simple NLP classifiers we’ve seen (for example sentiment analysis) mostly ignore time.
Motivations
N-Gram based language models scale poorly with the sequence length.
A better scaling can be achieved by using parametrized models based on neural networks.
However:
- NN has a fixed number of inputs and outputs wheres we need to handle different lenght sequences in the training and test sets
- If a word or group of words in a given location in the sequence represents a concept, then the same word (or group of words) at a different location is likely to describe the same concept that the new location.
A Recurrent Neural Network has a mechanism that deals directly with the sequential nature of language.
- It handles the temporal nature of language without the use of arbitrary fixed-sized windows.
- It offers a new way to represent the prior context, in its recurrent connections, allowing the model’s decision to depend on information from hundreds of words in the past.
Recurrent Neural Network
A RNN is any network that contains a cycle within its network connections, meaning that the value of some unit is directly, or indirectly, dependent on its own earlier outputs as an input.
Consider a vector
Sequences are processed by presenting one time at a time to the network.
Given a current input vector
- It is multiplied by a weight matrix
- passed through a non-linear activation function to compute the values for the hidden layer units
- The hidden layer is then used to calculate a corresponding output,
.
These three steps are common also in Neural Networks. The key difference is in the dashed lines showed in the following figure:
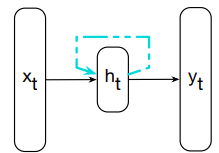 This link augments the input to the computation at the hidden layer with the value of the hidden layer from the preceding point in time.
This link augments the input to the computation at the hidden layer with the value of the hidden layer from the preceding point in time.
Context: the hidden layer from the previous time step provides a form of memory (context). It encodes earlier processing and is used to drive the decisions at later points in time
This approach does not impose a fixed-length limit on the context. It can include information back from the beginning of the sequence.
RNNs are not all different from non-recurrent architectures.
The most significant change lies in the new set of weights
The following figure shows that the hidden layer 
We don’t have a fixed lenght window since we process word-by-word and the context can include in principle all information back from the beginning of the text.
Inference in RNNs
Forward inference (mapping a sequence of inputs to a sequence of outputs) is nearly identical to feedfoward networks.
To compute
We proceed as in non-recurrent architectures by multiplying the weight matrix
Then, these values are addedd together and passed to an activation function
The usual computation for generating the output vector
- with
A softmax function is used as
Unrolling an RNN
The sequential nature i.e the fact that the computation at time
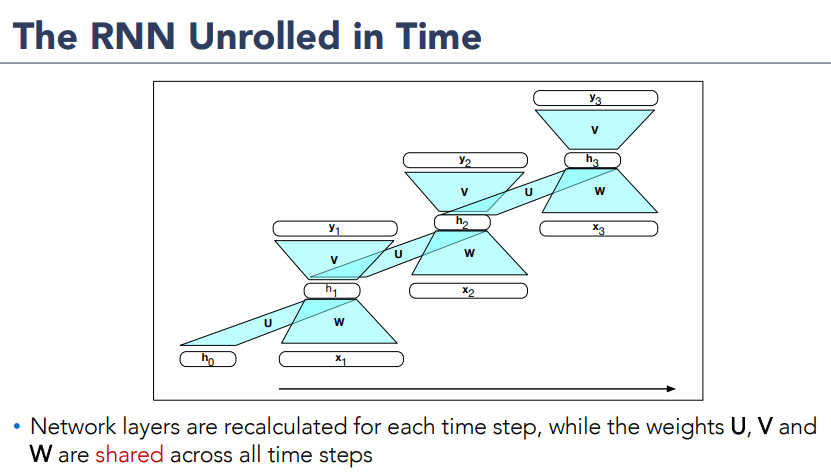
The various layers of units are copied for each time step to illustrate that they will hhave different values over time. However, the various weight matrices are shared across time.
Formally, weight matrices
Training a RNN
Like in a feedforward network, we’ll use a training set, a loss function and a back-propagation to obtain the gradients needed to adjust the weights in RNNs
We have 3 sets of weights to update:
, the weights from the input layer to the hidden layer the weights from the previous hidden layer to the current hidden layer the weights from the hidden layer to the output layer
Figure:
Highlight two considerations:
- To compute the loss function for the output at time
we need the hidden layer from time - The hidden layer at time
influences both the output at time and the hidden layer at time (and hence the output and loss at )
Therefore, the error due to
Training a RNN - Back-propagation through time
The backpropagation algorithm is a two-pass algorithm for training the weights in RNNs:
- First Pass: forward inference for computing
accumulating the loss at each time step, saving the value of the hidden layer at each step for use at the next time step - Second Pass: process the sequence in reverse, computing the required gradients, computing and saving the error term for use in the hidden layer for each step backward in time.
The general approach is called back-propagation through time (Werbos 1974, Rumelhart et al. 1986, Werbos 1990).
With modern frameworks, there is no need for a specialized approach to training RNNs: explicitely unrolling an RNN into a feedforward computational graph eliminates any explicit recurrencies, allowing the network weights to be trained directly.
Note: however for applications that involve much longer input sequences, such as speech recognition, character-level processing, or streamining continuos inputs, unrolling an entire input sequence may not be feasible. So instead, the input is unrolled into manageable fixed-lenght segments and treat each segment as a distinct training item.
RNN as Language Models
Recall the N-Gram Language Models: it predicts the next word in a sequene given some preceeding context. LM assigns conditional probability to every possible next word, giving us a distribution over the entire vocabulary.
The N-Gram LM computes the probability of a word given counts of its occurrence with the n−1 prior words. The context is thus of size
For the feedforward (neural) language models, the context is the window size.
RNN as LM: process the input sequence one word at a time, attempting to predict the next word from the current word and the previous hidden state.
RNNs don’t have the limited context problem of n-gram models or the fixed context of feedforward language modele. Since the hidden state can, in principle, represent information about all the preceding words back to the beginning of the sequence.
Difference Between feedforward neural network and RNN:
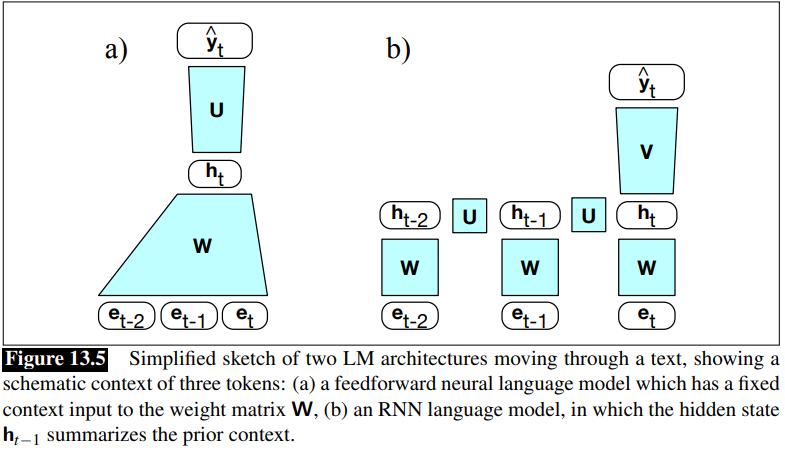 The RNN Language model uses
The RNN Language model uses
Foward Inference in an RNN LM
The Input Sequence
The output prediction,
At each step:
- the model uses the word embedding matrix
to retrieve the embedding for the current word - multiplies it by the weight matrix
- add it to the hidden layer from the previous step (weighted by weight matrix
) to compute a new hidden layer - The new hidden layer is then used to generate an output layer which is passed through a softmax layer to generate a probability distribution over the entire vocabulary
At time
= softmax( )
It is convenient to assume the same hidden
is is is and are so is is so is
The probability that a particular word
The probability of an entire sequence is just the product of the probabilities of each item in the sequence, where we’ll use
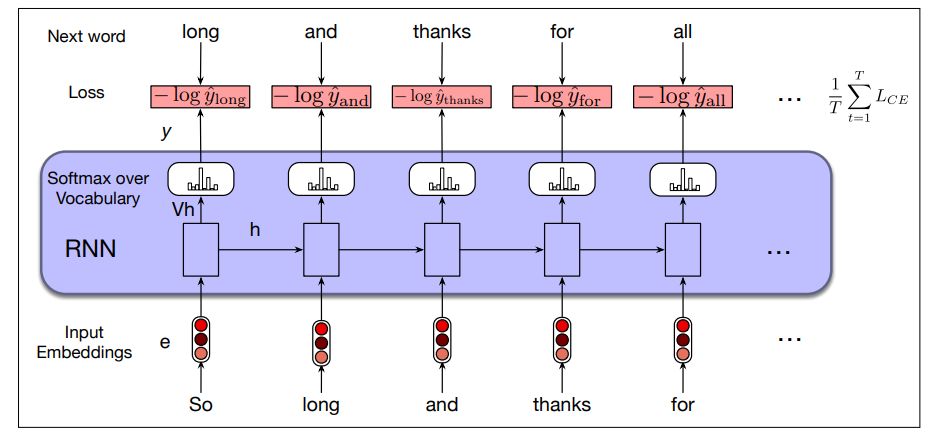
Training an RNN LM
We use self-supervision (also called self-training): we take a corpus of text as training set and at each time step
It is called self-supervised because we don’t have to add any special gold labels to the data; the natural sequence of words is its own supervision!
We train the model to minimize the error in predicting the next true word in the training sequence, using cross-entropy as Loss function, defined as:
the correct distribution
So at time
At each word position
- the correct word
- encoding information from preceeding
and uses them to compute a probability distribution over the next words so as to compute the model’s loss for the next token
Then we move to the next word, ignore what the model predicted for the next word and instead use the correct word
This idea that we always give the model the correct history sequence to predict the next word is called teacher forcing.
The weights in the network are adjusted to minimize the average CE loss over the training sequence via gradient descent.
The entire process is illustrated in the following figure:
Weight Tying
Observation: The columns of the embedding matrix
We assumed
Instead of having two sets of embedding matrices, language models use a single embedding matrix, which appears at both the input and softmax layers (
This is called weight tying (the same matrix transposed used in two places).
The weight-tied equations for an RNN LM becomes:
This approach provides improved model perplexity and significantly reduces the number of parameters required for the model.
RNN for other NLP Tasks
The basic RNN architecture can be applied to three types of NLP tasks:
- sequence classification: sentiment analysis and topic classification
- sequence labeling: Part-of-speech Tagging.
- Text generation
RNNs for sequence labeling
Task: assign a label from a small fixed set of labels to each element of a sequence (e.g., POS tagging and NER) Input: pre-trained word embeddings Output: tag probabilities from a softmax layer over the given tagset
Part-of-speech tagging as sequence labeling with a simple RNN:
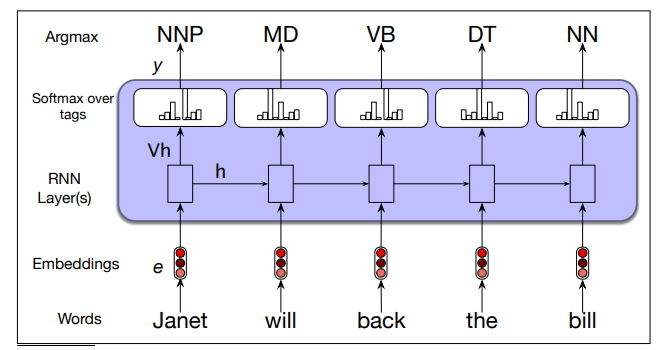
- To generate a sequence of tags for a given input, a forward inference is run over the input sequence, and most likely tag from the softmax is selcted at each step
- cross-entropy loss is used during training.
- Pre-trained word embeddings serve as inputs and a softmax layer provides a probability distribution over the part-of-speech tags as output at each time step.
RNNs for sequence classification
Task: classify entire sequences (text classification) i.e sentiment analysis or spam detection, document-level topic classification.
The text is passed through the RNN one word a time. A new hidden layer representation is generated at each time step.
The hidden layer for the last token of the text
This representation
The following figure illustrates this process:
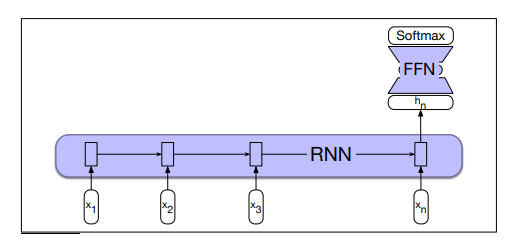
- Sequence classification using a simple RNN combined with a feedforward network. The final hidden state from the RNN is used as the input to a feedforward network that performs the classification.
No loss terms associated with elements before the last. There are no intermediate outputs. The loss function used to train the weights in the network is based entirely on the final text classification. The output from the softmax output from the classifier together with a cross-entropy loss drives the training.
The error from the classification is backpropagated all the way through the weights in the feedforward classifier through, to its input, and then through to the three sets of weights in the RNN (End-to-end training).
Alternatively: it is possible to use some pooling function of all the hidden states
Generation with RNN-based LMs
Autoregressive generation: we generate the next word based on which word generated i the previous steps. The same that we overviewed with Neural Network for Text Classification and Language Modelling.
- Initial Word Sampling: Start by sampling a word from the softmax distribution, using the beginning of sentence marker
<s>as the first input - Next Word Input: Use the embedding of the sampled word as input to the network at the next time step and sample the next word from the resulting softmax distribution
- Continue Generation: Repeat this process until the end-of-sentence marker
</s>is sampled, or a fixed length limit is reached
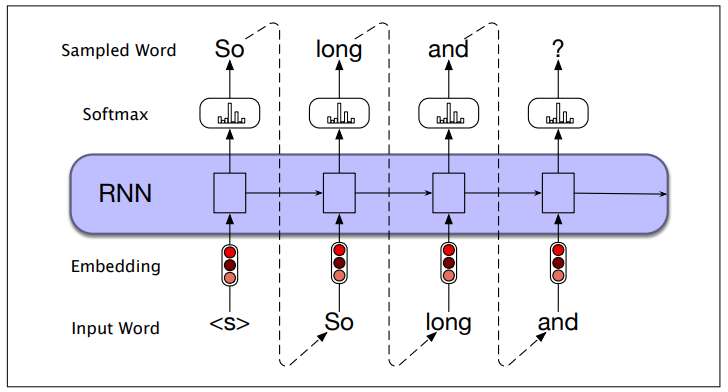
- What we already generated influences what will be generated next.
Technically, an autoregressive model is a model that predicts a value at time
This simple architecture underlies state-of-the-art approaches to applications such as machine translation, summarization, and question answering
Stacked and Bidirectional RNN Architectures
By combining the feedforward nature of unrolled computational graphs with vectors as common inputs and outputs, complex networks can be treated as modules that can be combined in creative ways.
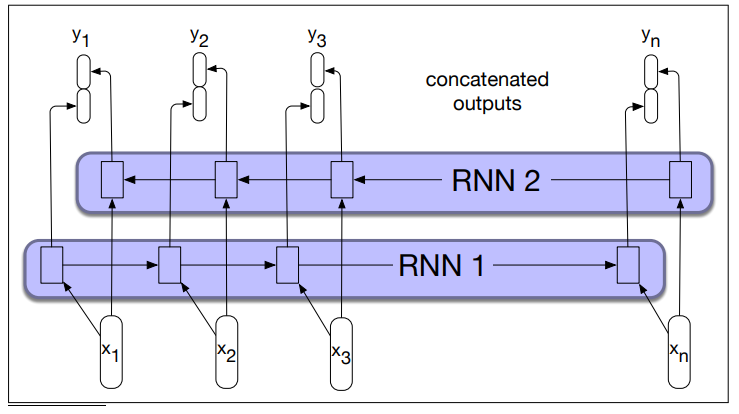
Stacked RNNs
In a stacked-RNNs the output of one layer serves as the input to a subsequent layer.
- The rationale is that the stacked structure induces representations at different levels of abstraction across layers.
- The optimal number of stacked RNNs is specific to each application and each training set
- However, increasing the number of stacks the training costs rise quickly
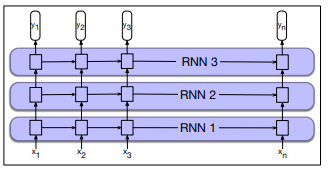
- The output at lower level serves as the input to higher levels
- the output of the last network serves as final output.
Bidirectional RNNs
Why Bidirectional RNNs Example from Named Entity Recognition:
- He said, “Teddy bears are on sale!”
- He said, “Teddy Roosevelt was a great President!”
If you use a RNN to look at the first part of the sentence to figure that Teddy is part of a person’s name. Because the first three words don’t tell you if they’re talking about Teddy bears or about the former US President.
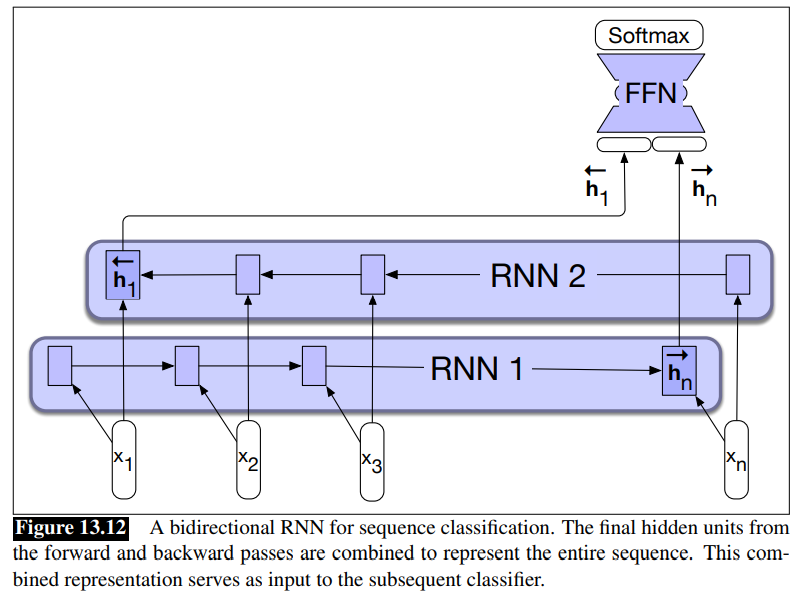
A bidirectional RNN combines two independent RNN:
- One that process the input from start to end
- The other process the input from end to the start
The two representations from the network are then combined into a single vector that captures both the left and right contexts of the input at each time step.
In the left-to-right RNN that we’ve discussed so far, the hidden state at time
We also train an RNN on a reversed input sequence, so the hidden state at time
Bidirectional RNN concatenate the two representations:
(We can use also other kind of representation not only concatenation)
The output at each step in time thus captures information to the left and the right of the current input.
- A bidirectional RNN. Separate models are trained in the forward and backward directions, with the output of each model at each time point concatenated to represent the bidirectional state at that time point.
Bidirectional RNNs have also proven to be quite effective for sequence classification.
The Long Short-Term Memory (LSTM)
RNNs Limitations
RNNs often struggle to process long-range dependencies.
The information captured in hidden states is typically focues on recent elements, making it difficult for them to consider distant contexts.
This is a significant challenge for many language applications that require understanding distant information. Distant information is critical to many language applications.
Example:
- The flights the airline was canceling were full
Assigning a probability to was is simple since airline is strong local context for the singular angreement.
Conversely, identifying the appropriate agreement for were is challenging because flights is distant, while the singular noun airline appears closer within the intervening context.
A network should be able to retain the distant information about plural flights until it is needed, while still processing the intermediate parts of the sequence correctly.
Vanishing Gradients Problem
Another difficulty with training RNNs arises from the need to backpropagate the error back through time.
In the backward pass, the hidden layers are subject to several multiplications depending on the lenght of the sequence. The gradients are eventually driven to zero.
The Long Short-Term Memory Extension
The Long Short-Term Memory (LSTM) was designed to maintain relevant context over time. Enabling to learn to forget information that is no longer needed and to remember information required for future decisions.
LSTM divides context management into two subproblems:
- removing information no longer needed from the context
- adding new information likely necessary for later decisions
LSTM adds to the RNN architeture:
- An explicit context layer (in addition to the usual recurrent hidden layer)
- Specialized neural units that make use of (gates) to control the flow of information into and out of the units that comprise the network layer.
- In practice, realized by additional weights that work on the input, the previous hidden layer and the previous context layer
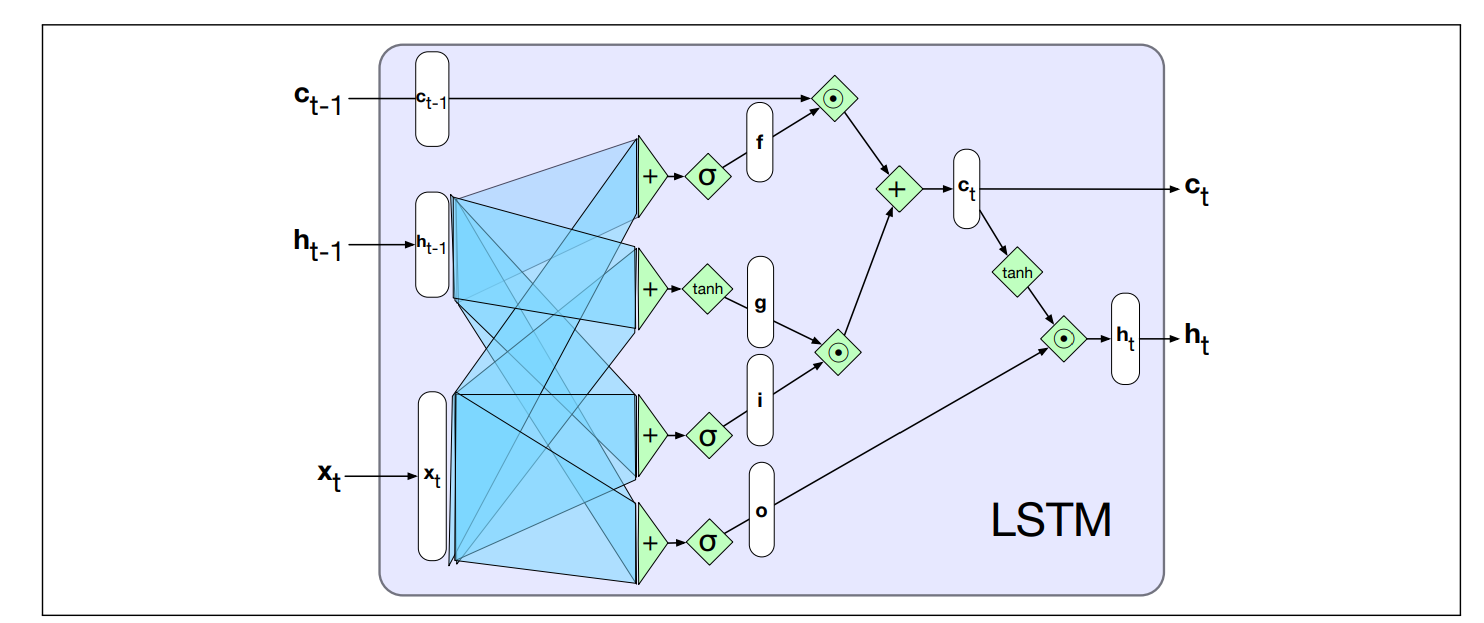
LSTM Gates
Gate Design Pattern: each gate consists of a feedforward layer, followed by a sigmoid activation function, followed by a pointwise multiplication with the layer being gated.
- Why the sigmoid: push the outputs either to 0 or 1. Combined with a pointwise multiplication has an effect similar to that of a binary mask
Note: the following matrices introduced in the gates are learned during the training process of the network. So for example in the forget gate, the network learns to forget.
Recall: element-wise multiplication of two vectors is the vector of the same dimension as the two input, where each element
Forget gate Removes the information no longer required from the context.
- Takes the previous hidden state
and the current input - Produces a vector of values in
- 1 means “keep this part of the memory”
- 0 means “forget it”
It is applied to the old cell state
Note that during backpropagation, the algorithm should compute
that is exatly , but this is approximately so in this way we solve the problem of vanishing gradients.
- The forget gate is upper in the figure, we applied the sigmoid to the previous hidden layer to get
, and then we apply it to the previous context layer
Add gate Selects information to add to the current context. This part has two components.
A candidate memory vector:
A filter gate (the gate):
- This decides which part of
should actually be added
Then the new information is addedd:
Next, we add this to the modified context vector to get our new context vector:
- using the tanh, the
is computed - applying the sigmoid the filter
is computed - it is then applied to
. - The final cell is updated using the context (that we applied before the remove gate
) and
Output gate What should become the next hidden state?
Decides what the network exposes to the next layer/time-step.
The gate:
Hidden state update:
- Take the current cell state
- Squash it with tanh
- Filter it, using the output gate
This becomes the RNN’s output at time
is the current input is the previous hidden state is the previous context - Output are a new hidden state
and an updated context .
LSTM Cell Output
The cell state
The hidden state
LSTM Modularity
The complexity of LSTM units is self-contained within the unit.
The only external addition over basic recurrent units is the inclusion of a context vector as both input and output. Modularity to easily experiment with different architectures.
This modularity underpins LSTM’s effectiveness and broad applicability. LSTMs (or variants like GRUs) can be seamlessly integrated into any network architecture. Multi-layer networks with gated units can be unrolled into deep feedfoward networks and trained via standard backpropagation.
Summary of RNN Architectures for NLP Tasks so far
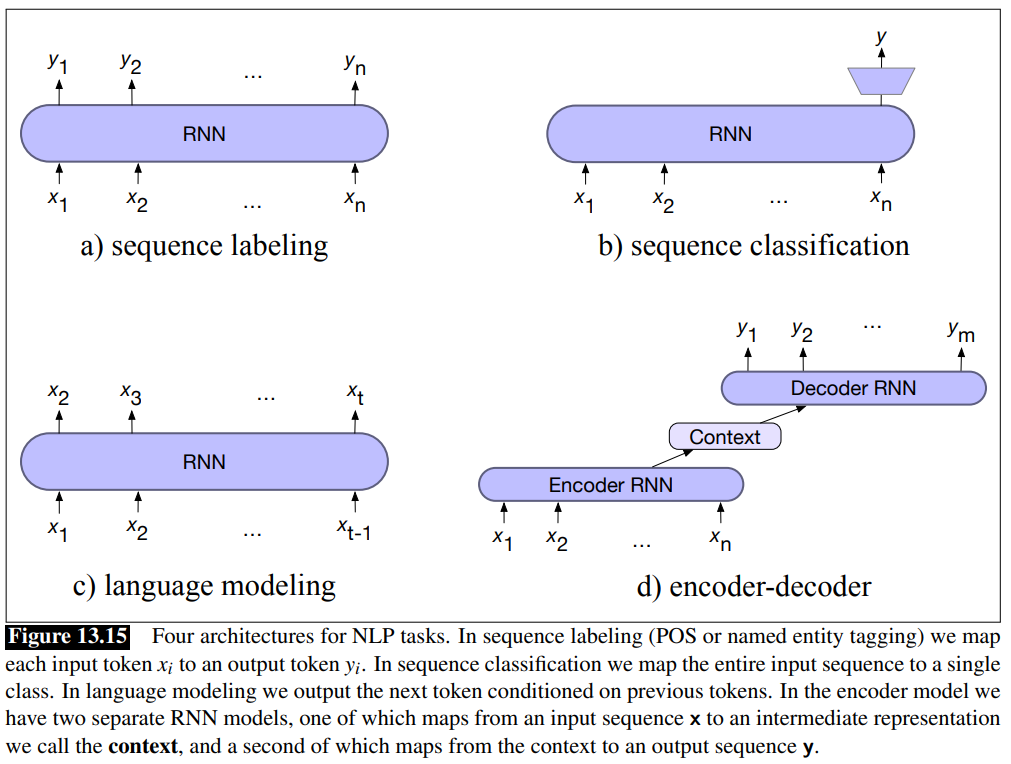
Transfer Learning: the RNN can be modified to do classification applying another layer at the end.
The Encoder-Decoder architecture with RNNs
See also:
- ML2 - Lecture 16 - Autoencoders
- Transformers can be used as encoder
- RNN Encoder-Decoder Sequence-To-Sequence Architecture
Why Encoder-Decoder: There are many other applications in NLP where you have to process an input sequence of a length and produce as output of different length. For example, in machine translation you have to produce as output a translation in the target language. And the two sentences in the source and target language are of different length. Another task where there is a similar problem is text summarization.
In all these cases we need the Encoder-Decoder, based on RNNs.
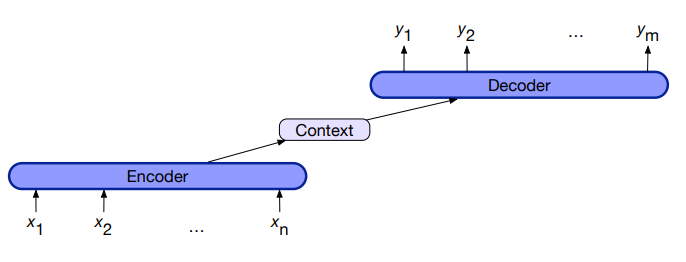
Encoder-Decoder networks (also called sequence-to-sequence networks) generate contextually appropriate, arbitrary-length output sequences given an input sequence.
The key idea is to use:
- an encoder network that takes an input sequence and creates a contextualized representation of it, often called context. (context is a function of the hidden representation of the input)
- a decoder network that takes this representation and generates task-specific output sequence.
- Take an input sequence
- Create a contextualized representation of the input
- Given the input we produce some set of hidden states depending on the lenght of the input sequence.
Encoder-Decoder Components
1) Encoder that accepts an input sequence
- LSTMs, CNNs, and Transformers can all be used as encoders networks
2) A context vector,
, which is a function of - For example in machine translation could contains all information about the source information
3) Decoder that accepts
as input and generates an arbitrary length sequence of hidden states , from which a corresponding sequence of output states is created - Like for encoders, decoders can be realized by any kind of sequence architecture.
Then the decoder taking information from the context i.e machine translation, generate the output of an arbitrary length.
Encoder-Decor For Translation
We will see in this section an encoder-decoder network based on a pair of RNNs.
Recall that in any language model, the probability
If
Sentence separation: We want to translate the source text “the green witch arrived” from engish into spanish “llego´ la bruja verde”
Let <s>, and
The encoder-decoder model computes the probability
We are computing with the encoder-decoder architecture exactly
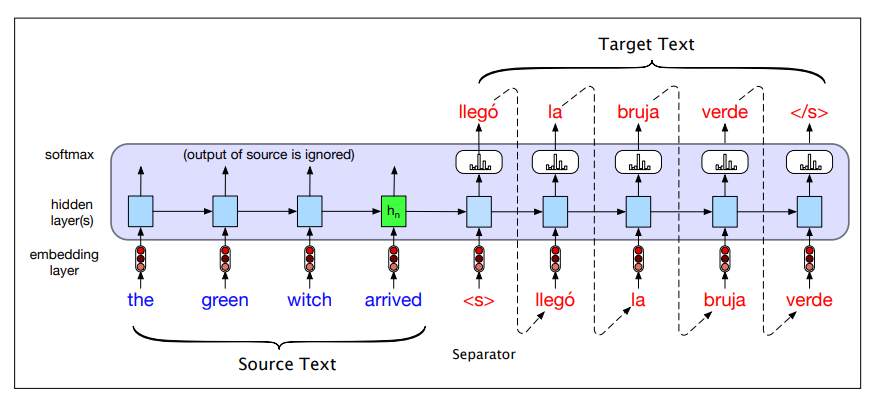
- Source and target sentences are concatenated with a separator token in between
- Decoder uses context information from the encoder’s last hidden state.
Encoder-Decoder Generation Process
To translate a source text:
- We run it through the network, performing forward inference to generate hidden states until we get to the end of the source.
- Autoregressive generation is started
- the decoder uses the final encoder hidden state (the summary of the entire source sentence) and the sentence separator as the first inputs.
- Subsequent words are conditioned on the previous hidden state and the embedding for the last word generated.
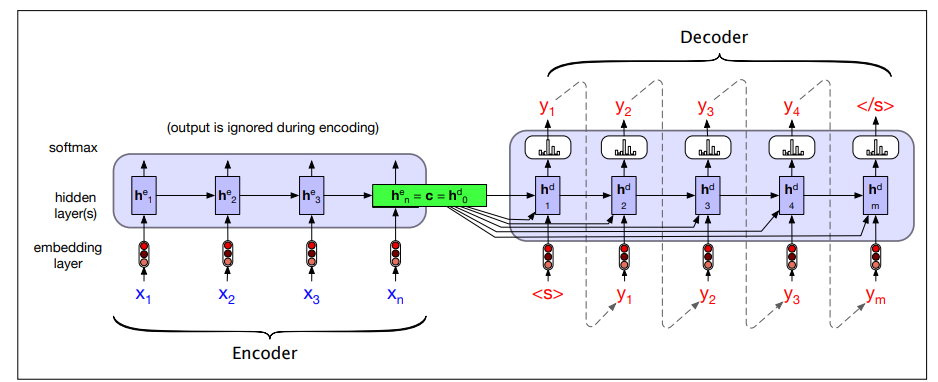
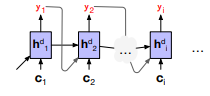
The entire purpose of the encoder is to generate a contextualized representation of the input. This representation is embodied in the final hidden state of the encoder,
Whenever we are continuing to produce words, the influence of
As shown in figure, what we do is to make the context vector
We do this by adding
The equations change in this way:
Recall that
Training the Encoder-Decoder
The training procedure is end-to-end. Each training example is a tuple of paired strings, a source and a target, concatenated with <s>. For MT, the training data typically consists of sets of sentences and their translations.
Training is shown in the following figure:
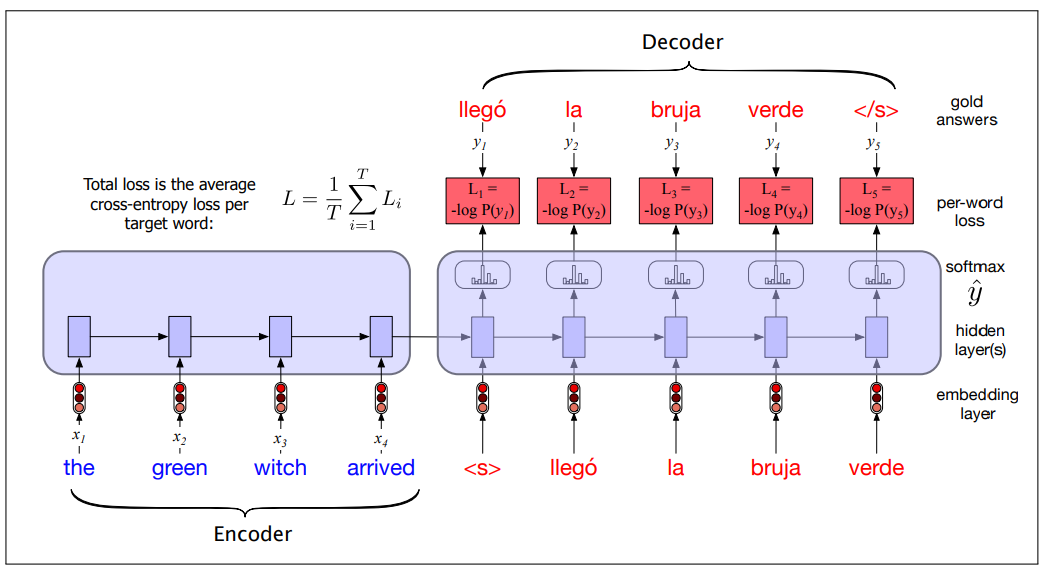
- In the autoencoder we don’t propagate the model’s softmax output
but use teacher forcing to force each input to the correct gold value for training - Then compute the softmax output distribution over
in the decoder in order to compute the loss at each token, which can then be averaged to compute a loss for the sentence. - This loss is then propagated through the deocoder parameters and the encoder parameters.
Training vs Inference differences: decoder during inference uses its own estimated output
When we compute the loss instead of computing the loss of best predict we compute the loss associated with each golden label.
Once the training set is prepared, the RNN-based language model is trained autoregressively. The network takes the source text, starts from the separator token, and predicts the next word (teacher forcing).
This procedure makes the training process faster.
This is done at both level, encoder and decoder, you can use complex architecture. So for example stacked RNNs and so on.
Attention
Bottleneck problem
We’ve just seen that the context vector 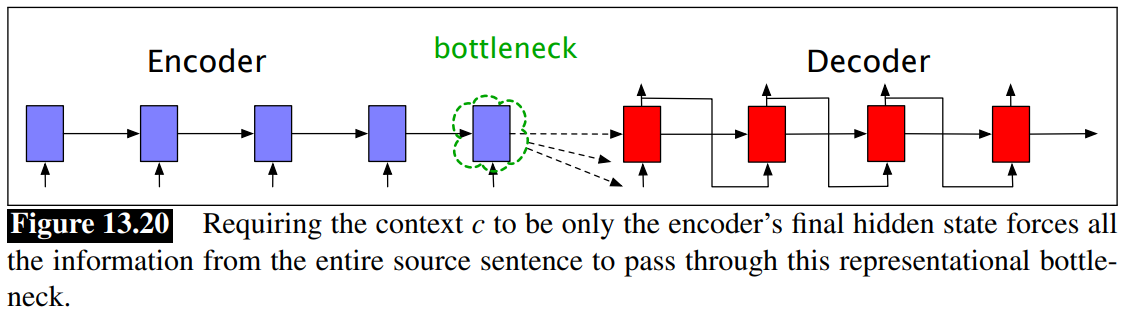
We don’t want to consider only
Attention Mechanism: The attention mechanism is a solution to the bottleneck problem. It allows the decoder to get information from all the hidden states of the encoder.

In the attention mechanism, the context vector
means hidden state of the encoder
The idea is to create a single fixed-length vector
The weights focus on a particular part of the source text that is relevant to the token the decoder is currently producing.
Attention replaces the static context vector with one that is dynamically derived from the encoder hidden states, different for each token in decoding.
The context vector
And shown in this figure:
Dot-product attention
The first step in computing
The relevance is captured by computing, at each state i during decoding, a score as a similarity (dot-product attention)
The result is a scalar that reflects the degree of similarity between the two vectors.
The vector of scores across all the encoder hidden states provides the relevance of each encoder state to the current step of the decoder.
A vector of weights,
Finally, given the distribution
is simply the weighted average over all the encoder hidden states
With this, we have a fixed-length context vector that captures information from the entire encoder states, dynamically updated at each decoding step.
Next figure shows a sketch of the encoder-decoder network with attention, focusing on the computation of
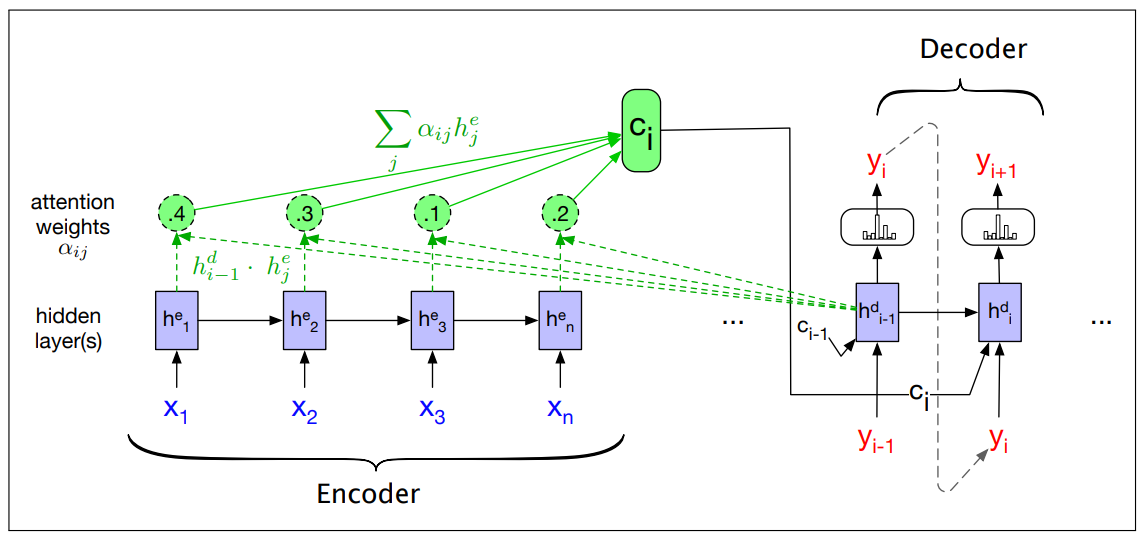
- We first compute alle the encoder states
- Then we can compute the similarity and get
- The context value
is one of the inputs to the computation of . It is computed by taking the weighted sum of all the encoder hidden states, each weighted by their dot product with the prior decoder hidden state that becomes also input of the decoder. - When computing
and we are taking into account part of the content that is relevant to produce this output, and this is dynamic since changes for all the states of the decoder because they are computed at the basis of similarity of the previous activation.
More sofisticated scoring functions:
It’s also possible to create more sophisticated scoring functions for attention
models. Instead of simple dot product attention, we can get a more powerful function that computes the relevance of each encoder hidden state to the decoder hidden state by parameterizing the score with its own set of weights,
The weights
This bilinear model also allows the encoder and decoder to use different dimensional vectors, whereas the simple dot-product attention requires that the encoder and decoder hidden states.
A slight modification of attention, called self-attention is the basis on the [[NLP - Lecture - Transformers for NLP|[NLP] Transformers]] architecture.